现场动平衡测量传感器的工作原理(2)
作者:龙城国际 点击率:3215 时间:2016-07-11 11:07:36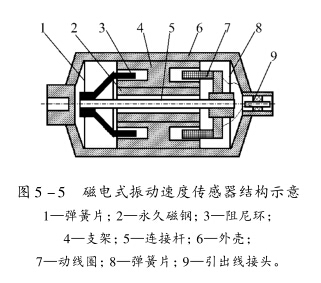
磁电式振动速度传感器按其支承系统工作原理分为*式和相对式两种。当传感器的外壳6固定在振动物体上时,整个传感器随着振动物体一起振动,圆柱形的*磁钢2通过支架4固定在外壳6中,借助外壳的导磁性形成闭合磁路,并在两端建立两个环形气隙。绕在骨架上的动线圈7置右边的气隙中。阻尼环3置于左边的气隙中。他们通过连接杆5起来。链接起来的动线圈7阻尼环3转很软的弹簧片1、8支承在外壳上。
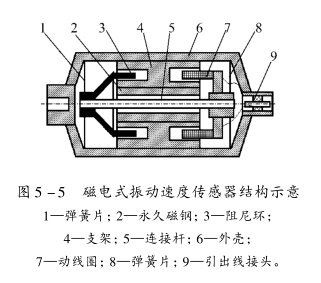
由于动线圈的固有振动频率ωn 很低,当振动物体的振动频率ω>1.5ωn时,动线圈处在相对静止状态(相对于传感器外壳),动线圈与磁钢2之间产生相对运动动线圈切割磁力线而产生电动势E:
E=BLV
式中,B为磁场强度;L为感应线圈导线长度;V为线圈相对于磁钢的运动速度。
当B、L一定时,输出电动势E正比于振动速度V,所以称其为振动速度传感器。又因为其振动的速度的相对于空间某一静止点而言,故又称为*式振动速度传感器。由于这种传感器安装方便,现场动平衡普遍使用这种传感器测量轴承的*振动。
相对式速度传感器的工作原理和的*式速度按传感器基本相同,不同的是连接动线圈7和阻尼环3的连接杆伸出传感器外壳,测量振动时,连接杆5作为测量振动探杆直接固定在振动物体上,而传感器外壳固定在相对静止的支架上,测量的振动表示振动物体相对于支架的振动速度,所以称其为相对式速度传感器。
来源:www.jpyqw.cn
**电话:400-6616-001
北京时代龙城科技有限责任公司